Robotic Steam-Bending
2017, in collaboration with Catherine Zanardi, Carter Nelson, Cesar Neri
The studio focused on robotic fabrication to create a full-scale module prototype of a larger designed truss system intended for a spanned roof support. The course merged traditional wood construction with emerging robotically assisted technologies of fabrication. The investigation was executed through the design, prototyping, and assembly of a full-scale truss module to be used as spanned roof support for a natatorium.

COMPUTATIONAL STRATEGY

Model
Renewed interest in timber construction as an ecological solution to contemporary architectural production led to the studio's research of steam bending and its application potentials. Initial studies of hand-bent pieces, jigs, and connections explored formal possibilities and tested material and technique limitations. Timber, as a natural resource, involves irregularities that challenge standardized fabrication. Such imperfections, however, create a set of known limitations to generate design solutions from the material itself.
Steam bending hardwoods creates complex forms that naturally propose exciting possibilities for material arrays. Pattern exploration for application as architectural frames or large span structures was studied through the aid of programs such as Rhino and Grasshopper. Three-dimensional simulations allowed studies of material connection points, the flow of stress through the structure, as well as sculptural and spatial views of the patterned truss system. Grasshopper's parametric modeling, paired with the robot's ability to shape custom frame members, introduced the idea of pattern manipulation across the framework.

FABRICATION STRATEGY
The fabrication for the full-scale module prototype consisted of tests and final production of the robot's end of arm tool, bending framework, drying framework, construction framework, decided hardware tectonics, prepped wood, robot programming, and construction coordination. There had to be test bends to create the desired bends, through reprogramming with geometry manipulation as well as the process itself. We arrived at 18 successful bends and created a module prototype that could exemplify the fabrication process and the direction of our design, at both its singular and full pattern scale.
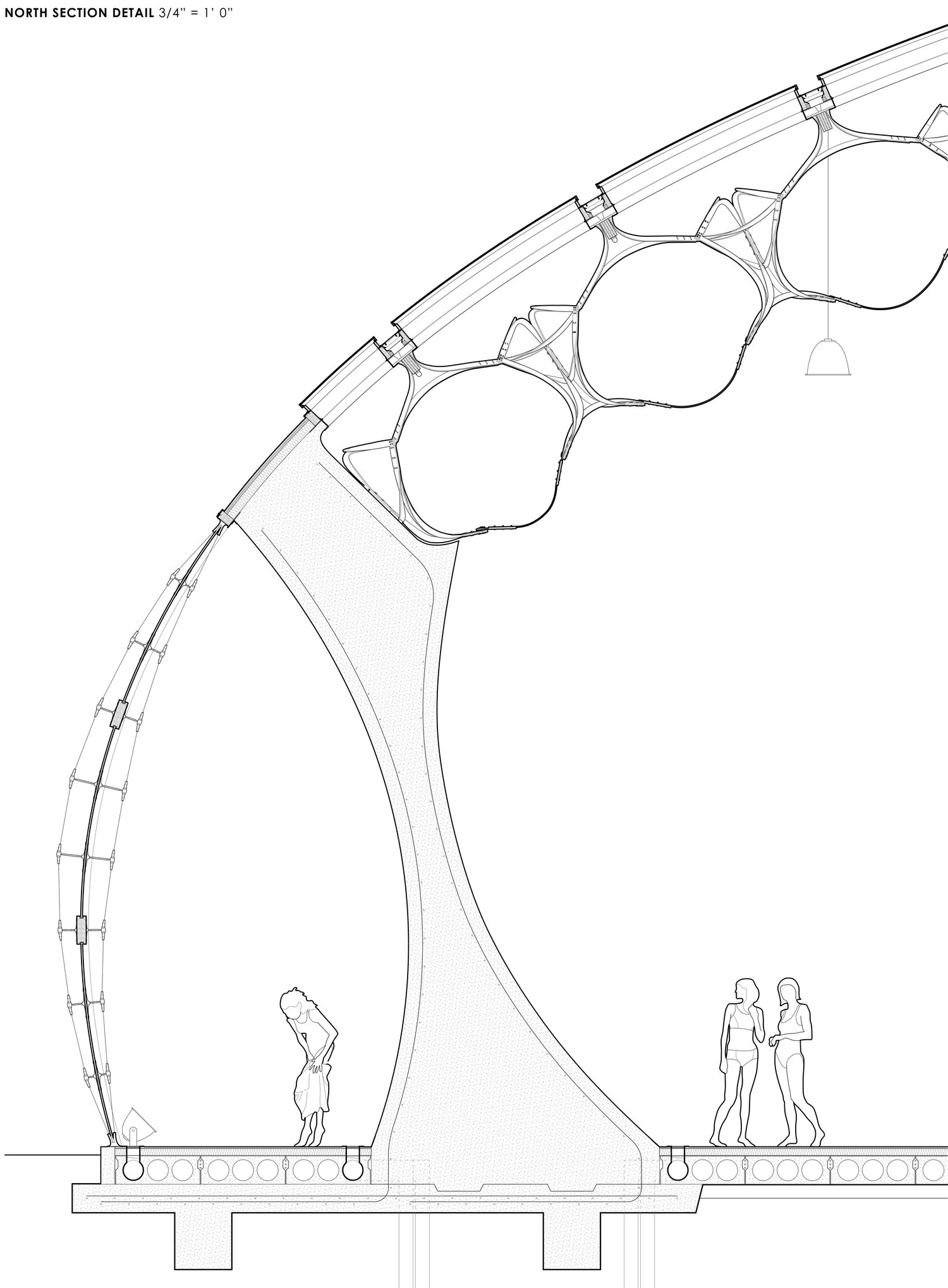
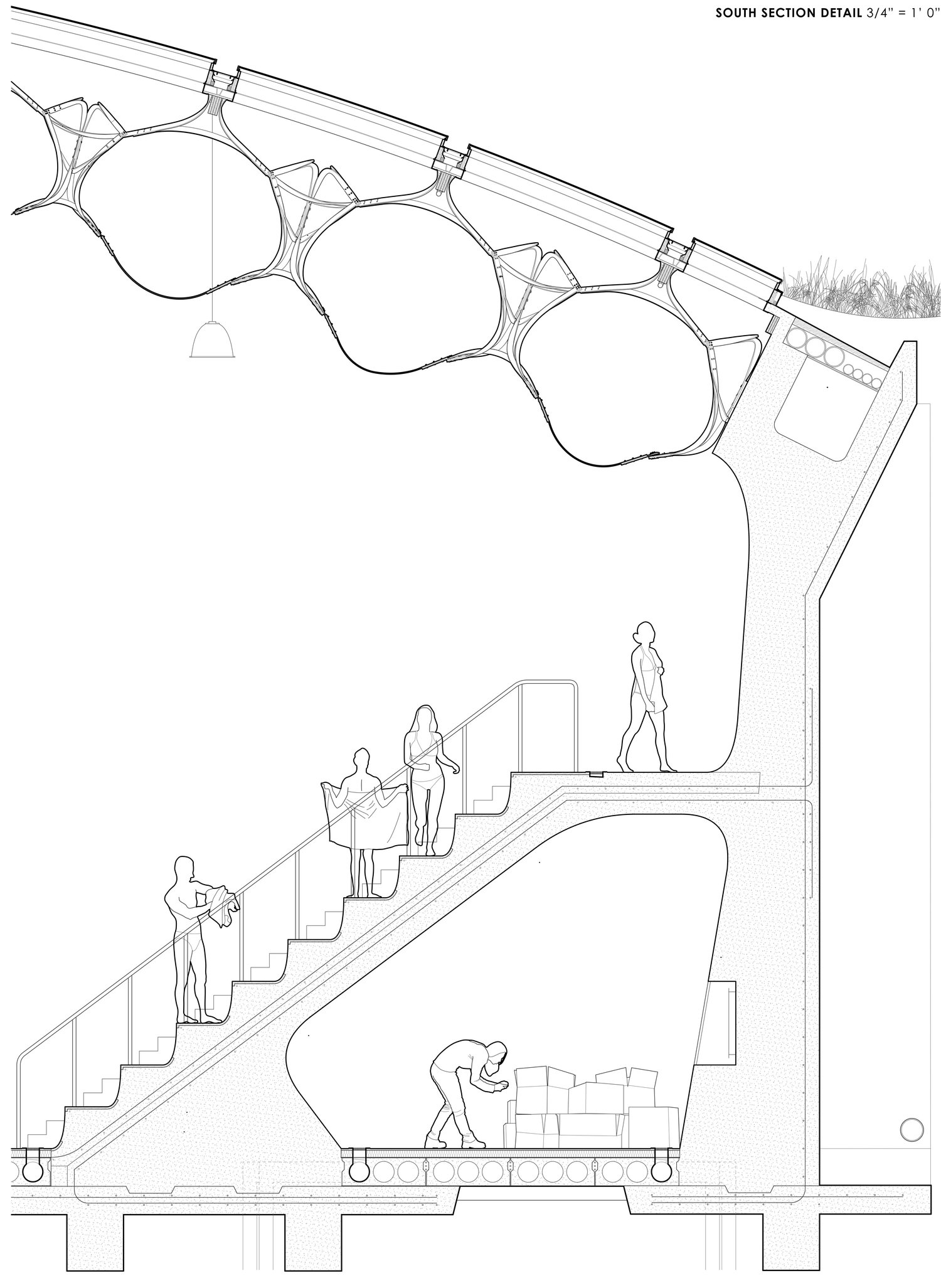
TRUSS STRATEGY
Feedback between the full-scale, singular prototypes and the digitally created, massed patterns helped to create an informed, yet creative, truss system. Architecturally, the trusses were imagined to span as arches, caught by concrete buttresses and boundary walls to resolve into the building's base. The truss used reductive geometry, stemming from cubes, circles, hexagons, and triangles, to resolve its complicated form and fabrication process. Although composed of 18 members, each module of the truss utilizes only 3 types of bends to create simplification for the larger truss system's potential for formal distortion.